
Nvidia
Nvidia的研究团队最近开发了透过深度学习技术教导机器人完成任务的模型,机器人能够借由观察人类的行为动作,学习如何与人类一同完成任务,Nvidia开发这套模型即是为了要增进人机合作,让机器人未来可以与人类合作无间。
要求机器人完成真实世界设定的任务,需要与机器人沟通任务的预期结果和过程中如何完成的提示,透过人类的示范,能够更有效地提供机器人完成任务最佳方式的提示。
Nvidia的研究团队用Titan x GPU训练了一套神经网络模型,来执行观察行动、生成计划、执行计划的任务,结果显示,机器人只需要观察一次人类在真实世界的示范,就能学习到如何完成任务。
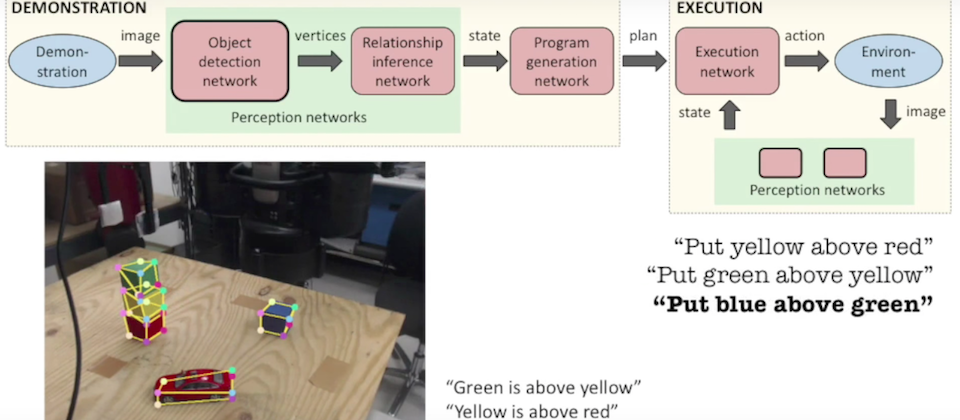
研究人员建立了3个神经网络,首先,机器人的摄影机会接收即时的影片,透过物体侦测网络,利用卷积式网络辨识拍摄中的物体,接着将这些物体资讯,输入到另一个神经网络,也就是物体关联性的网络,该网络会侦测物体神经网络分析影片中的物体和位置关系,再由计划生成网络,来产生如何重制观察影片动作的计划,最后,执行动作的神经网络会执行制定好的计划。
只要机器人观察人类完成任务的过程,就能自动产生可阅读的重制步骤计划,在机器人执行动作之前,使用者可以快速确认并修改任何问题。
Nvidia表示,这项让机器人学习人类动作的技术关键在于,利用合成的资料来训练神经网络,现在传统训练神经网络的方法,都需要大量的已标示(Labeled)资料,对训练网络来说,是一大瓶颈,透过合成资料生成的方式,能够轻松地产生大量的标记训练资料。
此外,该模型还有一个特别的地方,Nvidia指出,该模型第一次将以图像为中心的使用域随机化(Domain randomization)方法,用在机器人的研究上,使用域随机化是一种用来产生多种不同合成资料的技术,欺骗感知网络将现实世界的资料,当成其他不同种类的训练资料,研究人员为了确保神经网络不会依赖摄影机或是环境,选择了用以图像为中心的方式,来处理资料。
相关文章
 YouTube更新违反规定政策,提升惩处透明度和一致性
YouTube更新违反规定政策,提升惩处透明度和一致性2023-12-31 14:00:52
 传苹果将把中国iCloud正式交给本地化经营 苹果手机icloud换区存储操作
传苹果将把中国iCloud正式交给本地化经营 苹果手机icloud换区存储操作2023-12-27 18:34:43
 刘德华代言什么手机?刘德华成华为Mate 60 RS非凡大师华为5G新手机代言人
刘德华代言什么手机?刘德华成华为Mate 60 RS非凡大师华为5G新手机代言人2023-09-26 21:55:08
 WebOS新系统:Palm Pre手机最新款高价登港
WebOS新系统:Palm Pre手机最新款高价登港2023-06-23 15:39:14
 帮助企业组织对抗勒索软件,资安通报机构设立防护专区,可协助事前、事中与事后因应
帮助企业组织对抗勒索软件,资安通报机构设立防护专区,可协助事前、事中与事后因应2023-06-22 09:36:10
 蔚来全系产品降价3万 取消免费换电 换一次电池180元
蔚来全系产品降价3万 取消免费换电 换一次电池180元2023-06-12 17:27:49
 电商平台三巨头开打最大规模折扣 价格战再次打响
电商平台三巨头开打最大规模折扣 价格战再次打响2023-03-05 18:58:40
 爱立信节省成本裁员四千人 爱立信全球员工总数五分之一
爱立信节省成本裁员四千人 爱立信全球员工总数五分之一2023-02-24 22:27:29
 蜜芽关停近况,八位数重金买三字顶级新域名mia.com也关闭
蜜芽关停近况,八位数重金买三字顶级新域名mia.com也关闭2023-02-23 16:18:14
 联想CEO杨元庆:联想集团需要裁员32%削减部分业务支出
联想CEO杨元庆:联想集团需要裁员32%削减部分业务支出2023-02-18 12:45:25
 蓝色光标2022营收亏损18亿 客户预算减少明显
蓝色光标2022营收亏损18亿 客户预算减少明显2023-02-18 12:40:08
 三星工厂或将80%生产转至越南 因本地劳动力成本上升
三星工厂或将80%生产转至越南 因本地劳动力成本上升2023-02-17 23:09:16
 香港八达通卡如何激活?没用失效过期余额怎么办
香港八达通卡如何激活?没用失效过期余额怎么办2023-02-17 18:34:51
 中兴通讯被曝将裁员20% 称只裁国外的
中兴通讯被曝将裁员20% 称只裁国外的2023-02-17 18:33:26
 苹果新iPhone15Pro手机终于改用USB-C(火牛)数据线??Lightning充电接口退出
苹果新iPhone15Pro手机终于改用USB-C(火牛)数据线??Lightning充电接口退出2023-02-17 16:57:22
 突发!蓝色光标曾为中国民企500强龙头 如今业绩亏损断崖下跌
突发!蓝色光标曾为中国民企500强龙头 如今业绩亏损断崖下跌2023-02-16 14:31:19
- 三星发布自家carplay车载中控系统 Car Mode for Galaxy 可以连接carplay吗?
2023-02-14 00:53:17
 Opera浏览器宣布集成ChatGPT 一键生成网页内容摘要
Opera浏览器宣布集成ChatGPT 一键生成网页内容摘要2023-02-14 00:32:08
 谷歌google计划重返进入中国市场?但结果可能令你失望
谷歌google计划重返进入中国市场?但结果可能令你失望2023-02-13 16:57:15
 Zoom紧急裁员1300人 佔员工总数15%
Zoom紧急裁员1300人 佔员工总数15%2023-02-08 14:59:11
最新资讯
- YouTube更新违反规定政策,提升惩处透明度和一致性2023-12-31 14:00:52
 美国法院裁定阿里须为Squishmallows玩具侵权案答辩2023-12-28 19:59:34
美国法院裁定阿里须为Squishmallows玩具侵权案答辩2023-12-28 19:59:34 小米汽车传员工3700人 雷军称小米汽车不可能卖9万92023-12-28 19:41:57
小米汽车传员工3700人 雷军称小米汽车不可能卖9万92023-12-28 19:41:57 吉利飙逾6% 电动车品牌极氪新车款极氪007昨上市 预售价格22.99万元2023-12-28 19:30:28
吉利飙逾6% 电动车品牌极氪新车款极氪007昨上市 预售价格22.99万元2023-12-28 19:30:28 日本丰田汽车厂11月全球产量创新高2023-12-28 19:26:02
日本丰田汽车厂11月全球产量创新高2023-12-28 19:26:02
手机
 中国11月手机出货量增34% 5G手机出货量2709.2万部2023-12-28 19:27:57
中国11月手机出货量增34% 5G手机出货量2709.2万部2023-12-28 19:27:57 荣耀发布新一代旗舰荣耀Magic5系列,新款上市价格分期0首付3999元起2023-03-06 16:12:32
荣耀发布新一代旗舰荣耀Magic5系列,新款上市价格分期0首付3999元起2023-03-06 16:12:32 美国商务部指违禁,长江存储被美国拜登制裁名单面临停工裁员2023-02-17 18:41:53
美国商务部指违禁,长江存储被美国拜登制裁名单面临停工裁员2023-02-17 18:41:53 苹果Apple iOS车载系统CarPlay支持哪些更多汽车品牌2023-02-02 17:33:27
苹果Apple iOS车载系统CarPlay支持哪些更多汽车品牌2023-02-02 17:33:27 香港去哪买三星手机回来吗? 买香港便宜售价手机市场地点和网站2023-02-02 11:03:11
香港去哪买三星手机回来吗? 买香港便宜售价手机市场地点和网站2023-02-02 11:03:11
数码
- 华为5G芯片正式亮相:预示华为将发首款5G手机2023-08-31 13:22:33
 腾讯传计划放弃虚拟现实VR硬件计划2023-02-17 23:32:30
腾讯传计划放弃虚拟现实VR硬件计划2023-02-17 23:32:30 三星手机份额大跌!三星手机中国市场份额变化国内仅剩3%2023-02-01 17:06:15
三星手机份额大跌!三星手机中国市场份额变化国内仅剩3%2023-02-01 17:06:15 三星手机份额大跌在中国没市场了!国内市场占有率仅剩1%国外比苹果销量高2023-02-01 16:59:53
三星手机份额大跌在中国没市场了!国内市场占有率仅剩1%国外比苹果销量高2023-02-01 16:59:53 vivo发布2022 vivoNEX手机极简易浏览器下载:简洁流畅无广告!2022-12-02 17:29:30
vivo发布2022 vivoNEX手机极简易浏览器下载:简洁流畅无广告!2022-12-02 17:29:30
科技
 中兴受美国制裁事件 被罚了20亿美元过程事件始末 中兴被制裁后公司现状2023-11-02 22:12:46
中兴受美国制裁事件 被罚了20亿美元过程事件始末 中兴被制裁后公司现状2023-11-02 22:12:46 B站怎么炸崩了哔哩哔哩服务器今日怎么又炸挂了?技术团队公开早先原因2023-03-06 19:05:55
B站怎么炸崩了哔哩哔哩服务器今日怎么又炸挂了?技术团队公开早先原因2023-03-06 19:05:55 苹果iPhoneXS/XR手机电池容量续航最强?答案揭晓2023-02-19 15:09:54
苹果iPhoneXS/XR手机电池容量续航最强?答案揭晓2023-02-19 15:09:54 华为荣耀两款机型起内讧:荣耀Play官方价格同价同配该如何选?2023-02-17 23:21:27
华为荣耀两款机型起内讧:荣耀Play官方价格同价同配该如何选?2023-02-17 23:21:27 google谷歌原生系统Pixel3 XL/4/5/6 pro手机价格:刘海屏设计顶配版曾卖6900元2023-02-17 18:58:09
google谷歌原生系统Pixel3 XL/4/5/6 pro手机价格:刘海屏设计顶配版曾卖6900元2023-02-17 18:58:09