
Roboguide软件从V8.2版本以后增加了iRPickPRO模组,在此模组中可以进行机器人高速拾取工件模拟,同时支援模拟多台带有视觉跟踪功能的机器人从传送带上抓取和放置工件的过程。模组中集成了2D视觉跟踪功能,替代了原来的Vision Tracking功能,因此无需进行繁琐的视觉标定即可实现视觉定位与机器人引导,大大提高了模拟工作效率。本期开始,就为大家介绍一下iRPickPRO模组的使用。
一、建立机器人系统
1.点选桌面图示或在开始选单中点选“iRPickPRO”开启机器人高速拾取模拟系统,点选软件中的“New Cell”工具按钮,开启iRPickPRO建立向导。在此可以设定机器人工作站名称,机器人系统建立方式,新增进料输送带、出料输送带、机器人工具以及工件等内容,设定完成后点选OK按钮。 iRPickPRO建立向导
iRPickPRO建立向导
2.此时进入Virtual Robot Edit Wizard界面,即虚拟机器器人系统编辑向导,这里按照向导一步一步向下建立即可。除了机器人机器人模型选择设定步骤中选择自己需要的机器人型号外,其他步骤均保持预设设定。
 机器人模型选择
机器人模型选择
3.等待机器人控制器初始化完成后,机器人高速拾取工作站系统建立完成,软件工作区中出现机器人工作站模型,包含一台并联机器人,一条进料输送带,一条出料输送带,两只2D视觉感测器,以及若干区域感测器。
 机器人工作站
机器人工作站
4.同时在软件左侧浏览树中可以看到iRPickTool快捷属性栏,由机器人工具、机器人、料盒、输送带以及固定工位组成,在此可以对显示的专案进行属性设定。点选“Save Cell”工具按钮,储存工作站。
 iRPickTool快捷属性栏
iRPickTool快捷属性栏
二、新增工件
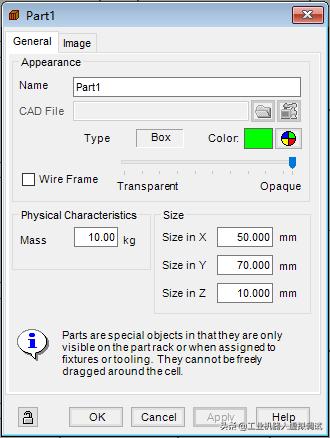
由于在iRPickPRO建立向导设定界面中我们并未设定新增工件,因此这里需要新增加工工件到工作站。左侧浏览树中点选ROBOGUIDE快捷属性栏,然后右击“Parts”节点,弹出的快捷选单中依次选择“Add Part”→“Box”,使用软件建模工具为机器人工作站建立简易工件,当然也可以选择外部数模作为加工工件。
 工件新增
工件新增
说明:
Color属性选项可以设定工件颜色;Mass属性选项可以设定工件重量;Size属性选项可以设定工件尺寸。
三、新增料盒
右击浏览树中的“Trays”节点,弹出的快捷选单中依次点选“Add Tray”→“Box”,新增简易料盒。 料盒新增
料盒新增
四、进料输送带配置
1.左侧浏览树中点选iRPickTool快捷属性栏,然后双击Conveyors节点下的“Infeed1”,在弹出的进料输送带属性对话方块中点选“Parts”属性标签,Parts选项下勾选Parts下的“Part1”,然后点选Apply按钮。2.Parts选项下点选“Part1”,然后在右侧的Part1 Offset选项下勾选“Edit Offset”,在其下的Location下的Z座标值中输入10(工件厚度为10mm),点选Apply按钮,工件被成功安装到进料输送带上。
 进料输送带工件新增
进料输送带工件新增
3.点选“Conveyor”属性标签,在其的Conveyor Type下点选“Infeed”,Conveyor选项下Arrival Distance后输入-500,Destroy Distance后输入3500,并勾选二者后面的“Visible”,进料输送带属性设定完成。
 进料输送带配置
进料输送带配置
说明:
Conveyor Type设定输送带型别;Width设定输送带宽度;Arrival Distance设定工件在输送带上出现的距离;Destroy Distance设定工件在输送带上消失的距离;Visible设定距离边界是否可见。4.点选“Feed Rate”属性标签,在Index:1的Rate(parts/min)下输入40,Speed选项下点选Constant,然后在其后的输入框中输入120,点选OK按钮。
 进料速度配置
进料速度配置
5.设定完成后点选“Show/Hide Conveyor Quick Bar”工具按钮,开启输送带操作工具条,在此工具条中可以手动操作输送带运动,用于测试工件在输送带上的执行情况。
五、出料输送带配置
1.参考进料输送带工件新增步骤,为出料输送带新增料盒与工件,新增完成后料盒与工件显示在出料输送带上。 出料输送带新增工件
出料输送带新增工件
2.点选“Conveyor”属性标签,在其下配置出料输送带属性,配置完成后出料输送带上显示料盒显示与消失边界。
 出料输送带配置
出料输送带配置
3.点选“Feed Rate”属性标签,配置出料输送带的出料输送速度。
 出料速度配置
出料速度配置
4.配置完成后使用“Show/Hide Conveyor Quick Bar”工具对出料输送带进行手动测试,然后点选“Save Cell”工具按钮,储存工作站。
(未完待续)
上一篇:Roboguide软件:机器人顶吊安装方式系统引数配置


































